Background of CAN and SAE J1939 Protocol
Controller–area network (CAN or CAN-bus) is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other within a vehicle without a host computer. CAN is a message packet based protocol, designed specifically for automotive applications, but also found in other areas such as industrial automation and medical equipment.

NI-Can PXI Card
As the CAN standard does not specify functionality of the application layer (such as flow , device addressing, or transportation of data blocks larger than one message frame) many implementations of higher layer application protocols have been created to meet different user needs.
One example of such a higher level CAN protocol is specified by the Society of Automotive Engineers (SAE) as J1939. The SAE J1939 protocol is widely used for communication between components of medium and heavy duty trucks, busses, agricultural implements, and construction equipment.
PC Card CAN
The J1939 standard is defined in multiple documents corresponding to five of the seven OSI layers. J1939-11 defines the physical layer, J1939-21 defines the data link and transport layer, J1939-31 defines the network layer, and J1939-71/73 defines the application layer. J1939-81 describes network management. J1939 messages are built on top of CAN 2.0b and make specific use of extended frames, which use a 29-bit CAN identifier.
Basic NI-CAN Drivers for LabVIEW
National Instruments provides a variety of CAN hardware which works seamlessly with the NI-CAN drivers provided within LabVIEW. The basic LabVIEW CAN drivers are divided into two different groups. The NI-CAN Frame API drivers collect and output CAN data at the frame level. Using these drivers, the programmer has to convert raw binary data into engineering units directly within their LabVIEW application. The NI-CAN Channel drivers collect the same CAN frame data, but converted directly into engineering units using parameters stored inside a referenced CAN database file (*.dbc or *.ncd). Most importantly, these two flavors of CAN driver cannot be used simultaneously to read and/or write data on the same physical port.
While NI provides LabVIEW several tool-kits and add-ons for a variety of other higher level CAN protocols such as ISO-15765, UDS, KWP2000, ODB, and CCP/xCP, they do not provide direct LabVIEW support for SAE J1939. NI provides several partial application examples for J1939 on NI.com; however, these examples are built on top of the NI-CAN Frame API. While using the example code, a programmer would not be allowed to use the Channel API, which provides obvious advantages for converting between broadcast CAN frames and engineering data.
Third-party J1939 protocol stacks written in other programming languages are available from a variety of vendors. While LabVIEW would support their integration into a application, this approach is not seamless and would require additional licenses and associated reproduction costs.
SAE J1939 Drivers for LabVIEW using NI-CAN Channel API
With the above limitations in mind, DMC wanted to leverage the power and flexibility of the NI-CAN Channel API to read, write, and request J1939 protocol data. By using the Channel API to perform higher level J1939 transactions, simultaneous use of the Channel API and the J1939 protocol fully supported. This allows the simultaneous capture of data over both transaction-based J1939 packets, and simple broadcast CAN frames. Moreover, the integration of J1939 CAN drivers with LabVIEW is seamless, leading to higher reliability and robustness.
NI-CAN J1939 LabVIEW Drivers
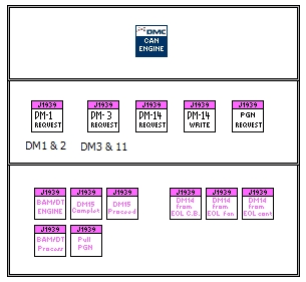
While the entire SAE J1939 specification is not fully implemented, the most critical aspects have been completely written and tested. For this particular project, DMC specifically required the use of the Parameter Group Number PGN request service, and the diagnostic message (DM) commands, DM1, DM2, DM3, DM11, and the very important DM14 /DM15 / DM16 exchange. Broadcast Area Announcement (BAM) transactions are supported along with multi-frame transport packets, enabling the exchange of long data sets. These base functions could easily be used to implement any missing or custom functionality required within the J1939 specification.
With these tools, DMC was able to fully communicate with the customers ECU using high level J1939 transactions, while simultaneously reading and writing broadcast engineering data with the ease of the NI-CAN channel API.
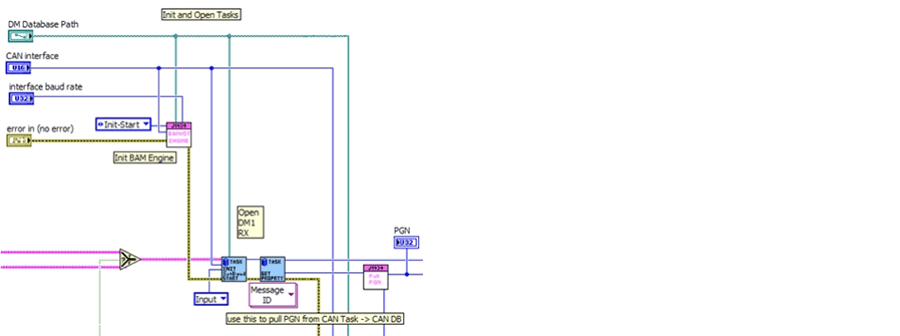
LabVIEW Block Diagram
More information on the LabVIEW J1939 Drivers, including a free download.